All vertebrate limbs have certain basic design and function elements in common:
—a highly mobile proximal joint that exchanges energy with the trunk of the body via some intermediate articular surface geared for high acceleration (like the scapula):
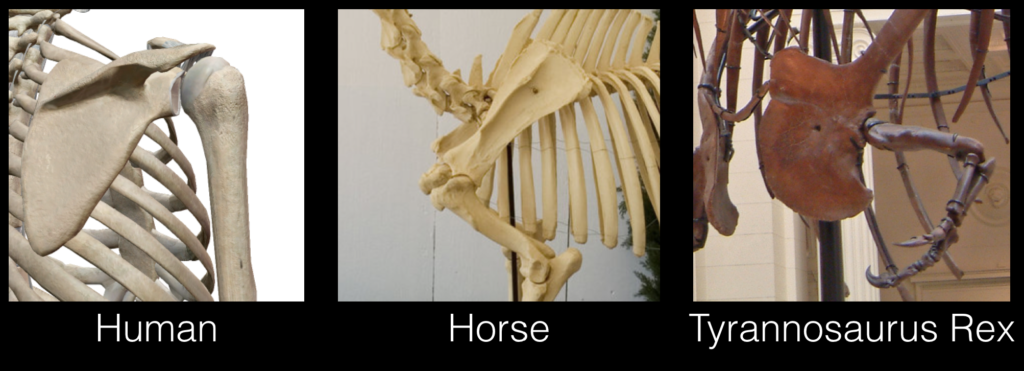
—a “middle” joint that, in addition to supplying torque capacity, also allows the limb to dramatically shorten and lengthen in order to harness angular momentum:
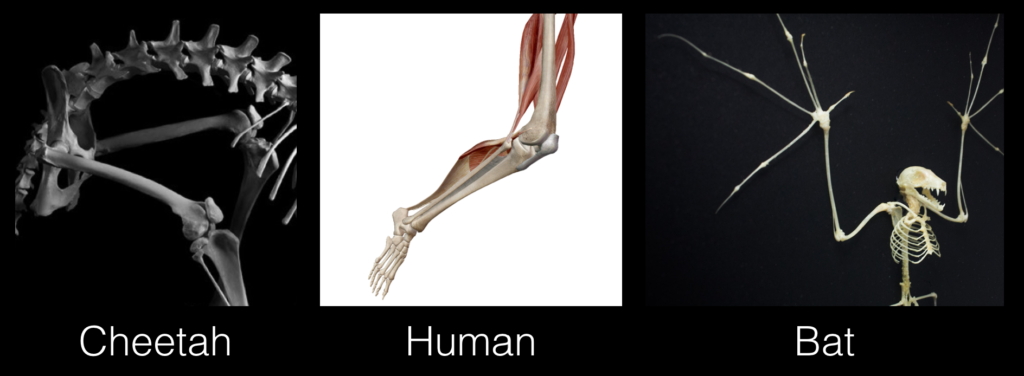
—and a distal joint that allows the energy accumulated from the trunk to be dispersed into a multi-flanged implement, capable of adapting the limb to a three-dimensional environment:
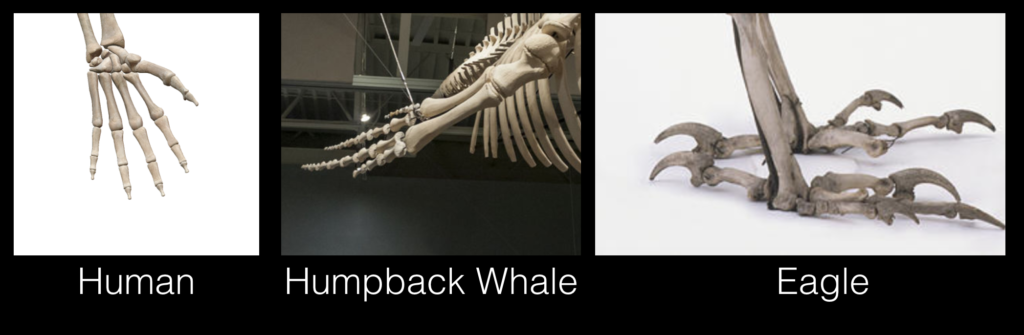
Everything stated above is as true of an arm as it is of a leg, a wing or a flipper—and is just as true for a human as just about any other vertebrate.
These basic criteria make a limb, and adapting limbs to specialised tasks occurs through manipulation of these fundamental elements.
If a limb has to move the organism through a space by interacting with earth’s surface—terrestrial propulsion—the organism will be best served if the limb can be geometrically positioned beneath the center of mass. This allows the organism to harness the maximum amount ground reaction force, while also keeping a wide range of directional options available for the action that follows.

Consider the horse and rider above: when landing, the rear limb makes impact with the ground almost dead center to the horse’s body in the sagittal plane. The rider, too, manipulates his legs to mimic the same behaviour, because it is the most stable way to move at high speed. We can easily handle three or four times our bodyweight when we run, but the forces we encounter when moving on the back of a 1000-pound animal at 30 miles an hour would quickly—and disastrously—overcome our vertical spinal columns.
A quick glance at the coronal plane shows the same center-seeking behaviour in the rear propulsion limb of the horse:

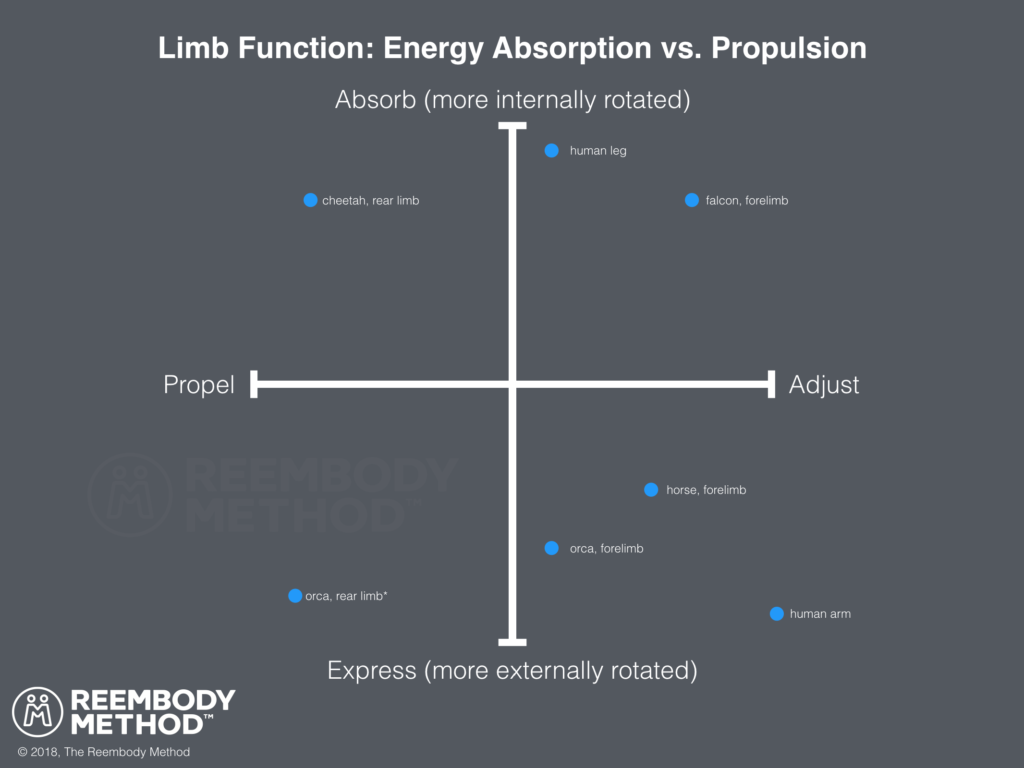
If the rear limb is seeking center in both the sagittal and coronal planes, there’s one quick way to facilitate both: internal rotation. A limb specialised for propulsion needs its loading phase to coincide with internal rotation relative to the trunk. This is true for humans, too.
This is not necessarily the case with limbs specialised for non-propulsive tasks. Note that the forelimb of a horse is not center-seeking; the forelimb lands wider and farther forward than the center of mass (and is therefore more externally rotated, relative to the rear limb): its primary role is directing the motion of the center of mass, with a secondary function of contributing to gait. The forelimb must remain sensitive to impact conditions in order communicate adjustments to the rear limbs for ideal propulsion:


A horse’s forelimb has as much in common with the function of a human arm as it has with its own leg; humans just took that same sensitivity to adjustment and dialed it up to 11. In fact, we became so specialised for sensitivity that the arm isn’t even a secondary contributor to gait anymore; the best it can do is diminish loss by recycling unused energy back into the gait. (But, make no mistake: the legs generate all the power.)
The pay off is that we can express massive amounts of force into the environment using our forelimbs. A limb that needs to express a ton of energy into the environment adopts an externally rotated position relative to the trunk so that, during activity, it can spend a longer period in the internally rotating, local-energy-release phase. Accelerating over a longer period means more accumulated energy.

Wait, wait: I worry what you just heard was: “Give me a lot of internal rotation.” What I said was: Give me all the internal rotation you have.
Vertebrates transmit force across both single joints and cooperative systems of joints almost exclusively through torque. When natural selection begins to push limbs toward new tasks, those new tasks will necessarily require the ratio of torque between local joints to change. This is one of the mechanisms through which evolutionary adaptation actually happens.
Human arms didn’t “become” legs (or vice versa) anymore than chimpanzees “became” human; all limbs share a common ancestral design, with variations on that design implemented through, among other things, changes to the relative position of the limb’s components to the trunk of the body in the transverse plane.
Kate
Whoa. Why don’t more people talk about this stuff? Seriously mind-blowing.